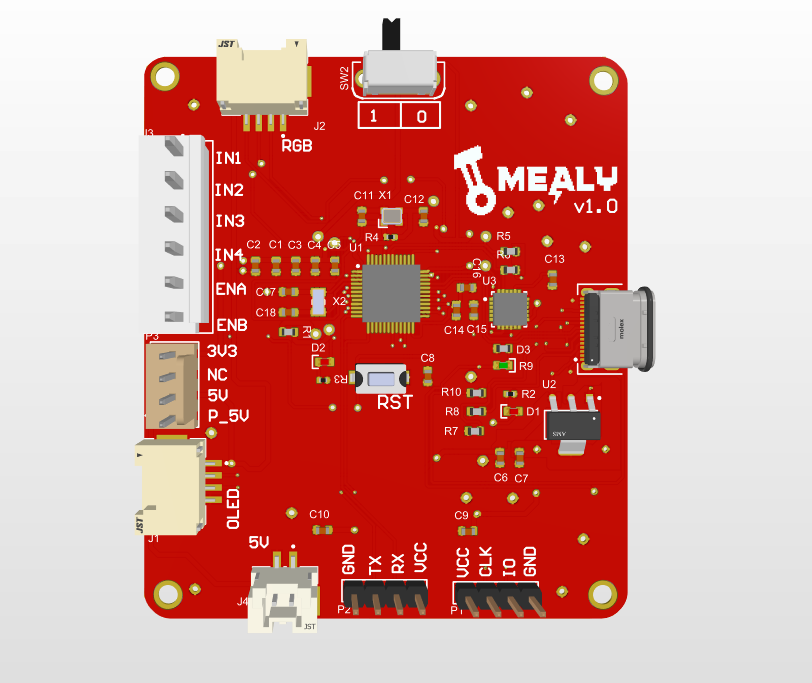
Mealy - Self-balancing robot
Published on Aug 3, 2025 |
0 Likes
 edwin14400519
- Kenya
edwin14400519
- Kenya
Description
Introduction
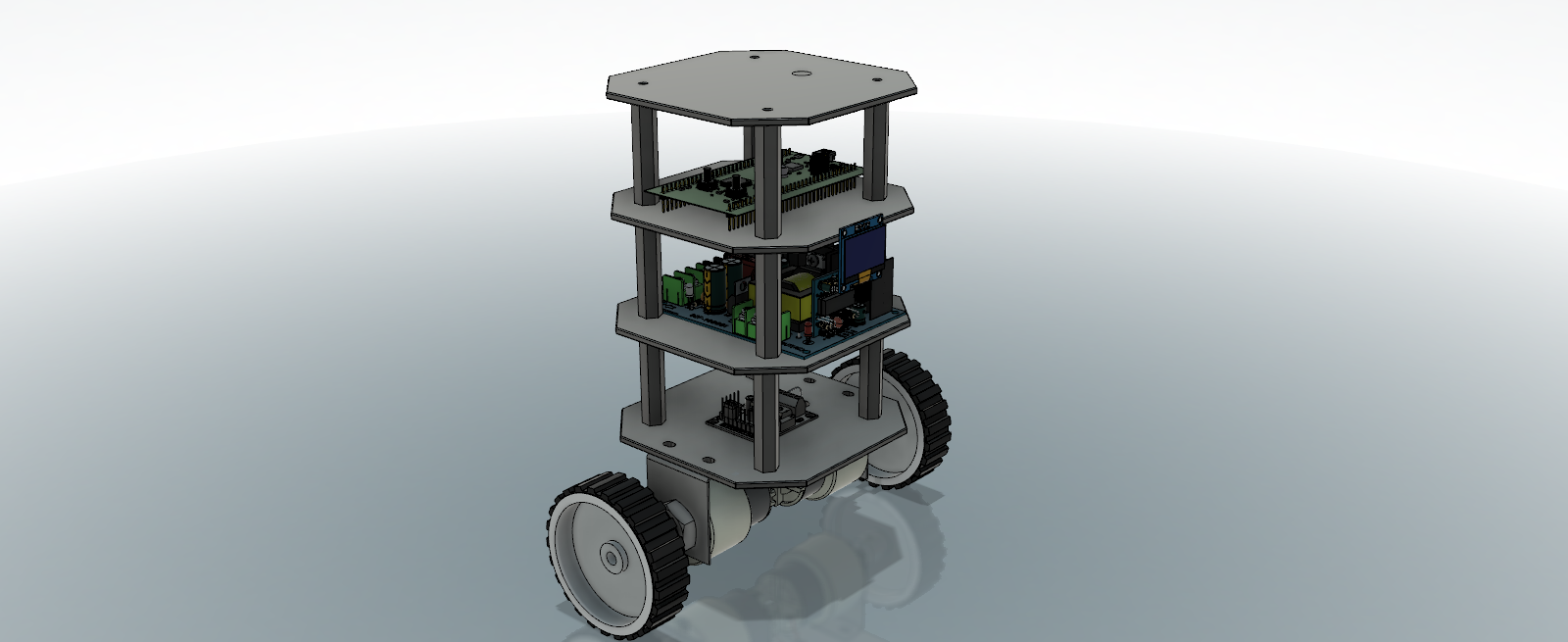
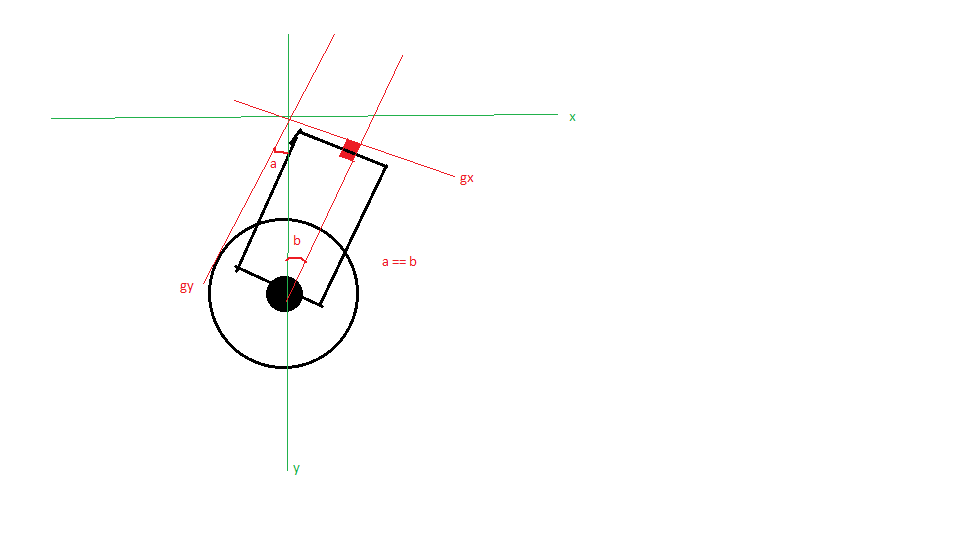
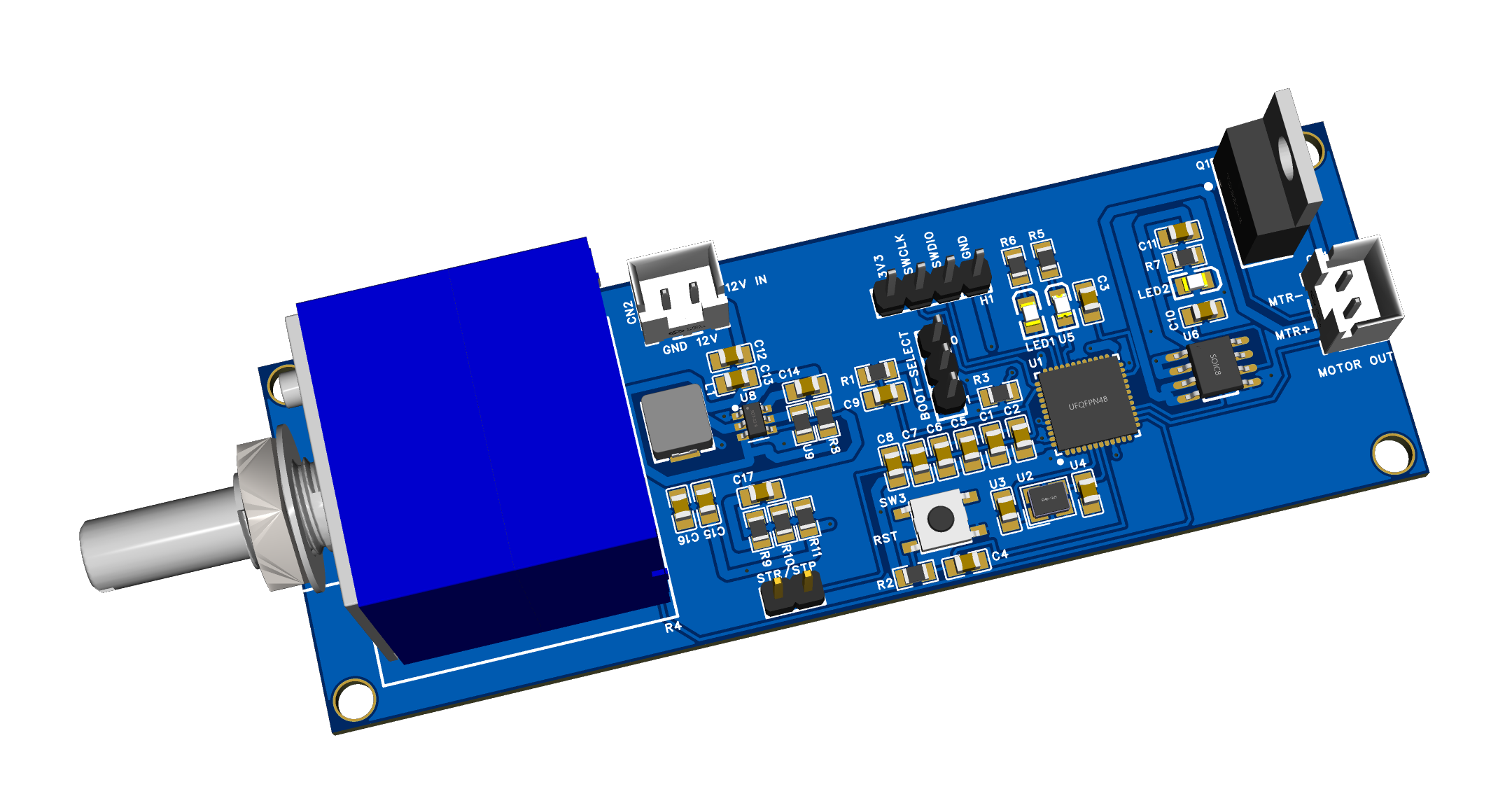
Mealy is a robot build with the aim of making it self-balancing on two wheels, using an MPU6050 IMU and an STM32F103C8T6 MCU. It is built for the sole reason of learning about control systems specifically the PID control algorithm, and how it is and can be applied to real robotics systems. This means that tuning the system, which is a major part of the bulding process, is considered throughly.
Github Link
https://github.com/bytecod3/Mealy
Tools used
- KICAD, STM32CUBE
Project Files (2)
| Filename | Type | Date Modified | |
|---|---|---|---|
| tilt-angle-1.png | PNG | Aug 3, 2025 | |
| mealy.png | PNG | Aug 3, 2025 |
Specifications
Protoboard design
0
0
0
Published: Aug 3, 2025
Published: Aug 3, 2025
The zip bundles together all the project files including schematic files, gerber files, 3D designs,
BOM, drill files, datasheets etc.
*MakePCB is a shared platform. We are not responsible for any design issues
copyright info
Attribution-ShareAlike (CC BY-SA)
Attribution-ShareAlike (CC BY-SA)
Related projects
Tools: EasyEDA, GIMP
Tools: Kicad, ESP32
Tools: Altium Designer
Comments (0)
Please Log in to add comments